takže ABS jen drobné doplňky a objednat PLA a pet-g o zavření do bedny docela uvažuji
přičemž zdroj nechat venku
Re: Rady 3D tisk.
a ajké lepidlo na jaké materiály používáte ? abs je jasné , ale pla a pet

Re: Rady 3D tisk.
Na pla funguje báječné vteřinové lepidlo. Pět je o něco složitější. Mě na to v celku funguje pružný 60 sec. lepidlo od Loctide.
2,4 Ghz
http://zaxcz.rajce.idnes.cz/
http://zaxcz.rajce.idnes.cz/
Re: Rady 3D tisk.
a co výrobci strun ? nějaké dobrý odzkoušený výrobce ?
zatím tisknu PLA od Verbatim , ale příští objednávku budu dělat z plasty Mladeč
zatím tisknu PLA od Verbatim , ale příští objednávku budu dělat z plasty Mladeč
Re: Rady 3D tisk.
Osobně mi Verbatim (ABS) přijde v celku předražený když uvážím kvalitu. To ale může být jen můj subjektivní pocit.
V každém případě PM jsou ověřenou značkou, takže tím chybu určo neuděláš. Pokud ti tak moc nezáleží na barvě, tak se mi dobře tiskne (PLA) od Gembird nebo Creality. Stojí o něco víc něž polovinu toho co PM takže za mě ideální pro testy jestli výtisk pasuje.
V každém případě PM jsou ověřenou značkou, takže tím chybu určo neuděláš. Pokud ti tak moc nezáleží na barvě, tak se mi dobře tiskne (PLA) od Gembird nebo Creality. Stojí o něco víc něž polovinu toho co PM takže za mě ideální pro testy jestli výtisk pasuje.
2,4 Ghz
http://zaxcz.rajce.idnes.cz/
http://zaxcz.rajce.idnes.cz/

Re: Rady 3D tisk.
Pla jsem opustil docela rychle. Přeci jen jeho odolnost vůči vlivum není nic moc. Plus další nedostatky. Dalším krokem bylo abs. Deformace a delaminace vrstev mě nasměrovali k petg. Petg mám rad. Preferuji čiré bez barvy. Třeba černé díky pigmentu více teče.
zajímavě vypadá petg s karbonový vláknem. Měl jsem v ruce tenvzorovej šroub co mají na fotce.
Prej dotahneme to co to jde. Pak jsme měli problém to povolit.
Co se týče podložky tak jsem začínal se sklem potřebným lepidlem. Pak přišel kapton. Následovala PEI fólie se kterou jsem hodně spokojen.
Teď mi přišla Anet E16 s tvrzený sklem a překvapuje mě jak na tom petg drží.
zajímavě vypadá petg s karbonový vláknem. Měl jsem v ruce tenvzorovej šroub co mají na fotce.
Prej dotahneme to co to jde. Pak jsme měli problém to povolit.
Co se týče podložky tak jsem začínal se sklem potřebným lepidlem. Pak přišel kapton. Následovala PEI fólie se kterou jsem hodně spokojen.
Teď mi přišla Anet E16 s tvrzený sklem a překvapuje mě jak na tom petg drží.
Re: Rady 3D tisk.
podložku používám magnetickou od creality , tisknku s límce a je to paráda jak se to sundává , jen ji sundám ohnu a ono to odpadne samo 
Re: Rady 3D tisk.
Magnetku tu mám připravenou pro tiskárnu mého navrhu. Snad ji ještě letos stihnu zprovoznit.
Re: Rady 3D tisk.
Šoupnes sem nějaký obr a popis pro představu?
2,4 Ghz
http://zaxcz.rajce.idnes.cz/
http://zaxcz.rajce.idnes.cz/
Re: Rady 3D tisk.
to by mě taky zajímalo ") , mě to trvalo asi minutu
, mě to trvalo asi minutu
https://www.banggood.com/Creality-3D-23 ... rehouse=UK
https://www.banggood.com/Creality-3D-23 ... rehouse=UK
Re: Rady 3D tisk.
Vice velikostí.
https://www.aliexpress.com/item/3300036 ... 4c4dESi1xQ
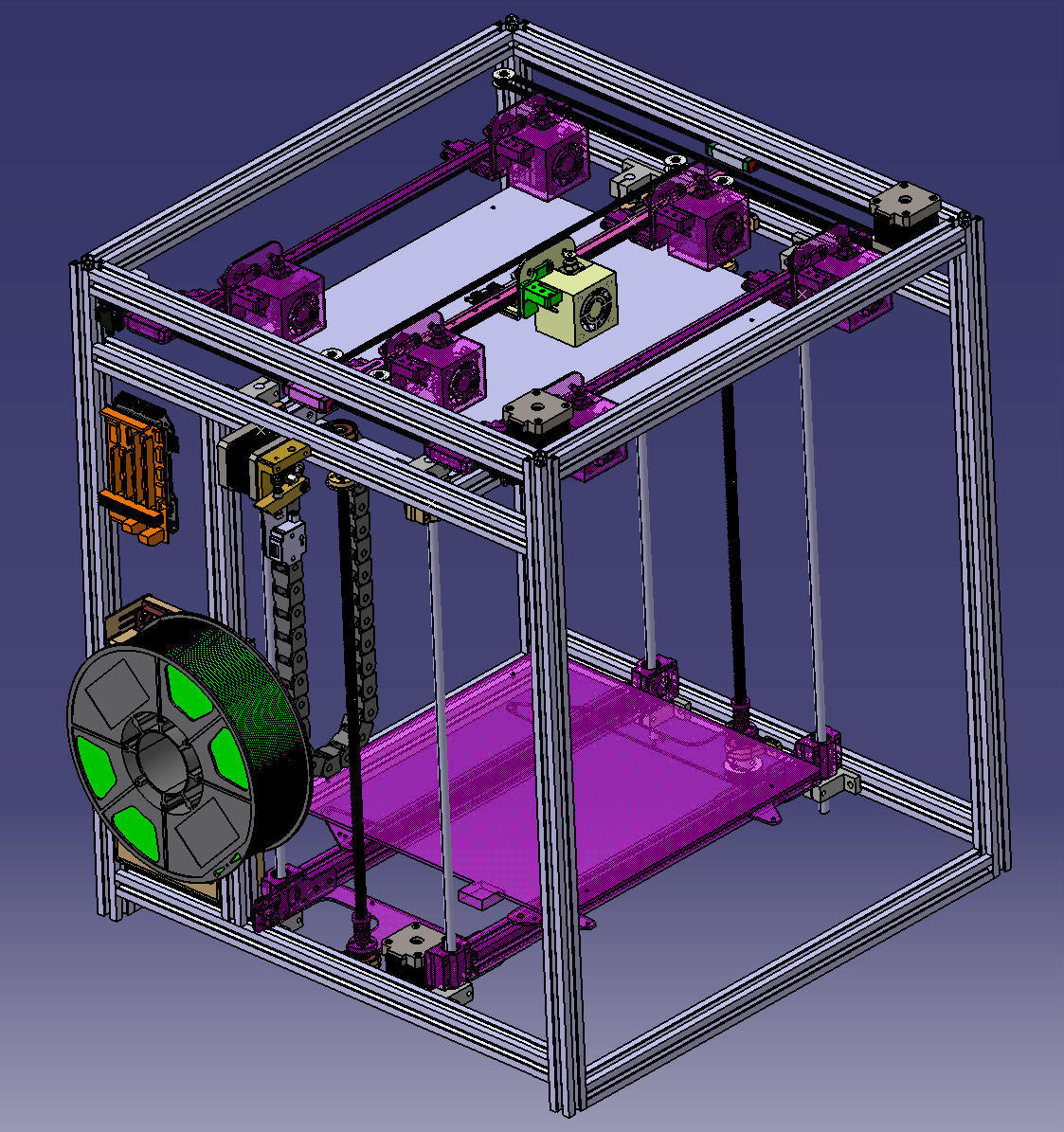
No moje budoucí tiskarna.
Původně to začalo jako modifikace Rebelix cube s rozměry tisku asi 300*300x*450. Plán byl, že maximum součástek půjde běžně koupit a zbylé budou na laseru vypálené z nerezu.
Během roku se koncept docela měnil. Posun XY se změnil na jednu z mutací CoreXY. Konkrétně z tiskárny Bucaneer.
Uložení extruderu jsem udělal kompatibilní s momentálně nejrozšířenější platformou. A díky tomu by modifikace pro CR10, Ender E16 a další tiskárny měli jít použit.
Z osa bude poháněna jen jedním motorem.
Pro řízení jsem koupil 32bit Re-Arm spolu s Ramps 1.6 a drivery TMC2130 v SPI variantě.
6 endstopů je samozřejmost a stejně tak sensor filamentu či sonda BL touch.
Kostka je větší než by musela být ale třeba bude časem výměna nástrojů, více filamentů a podobně.
https://www.aliexpress.com/item/3300036 ... 4c4dESi1xQ
No moje budoucí tiskarna.
Původně to začalo jako modifikace Rebelix cube s rozměry tisku asi 300*300x*450. Plán byl, že maximum součástek půjde běžně koupit a zbylé budou na laseru vypálené z nerezu.
Během roku se koncept docela měnil. Posun XY se změnil na jednu z mutací CoreXY. Konkrétně z tiskárny Bucaneer.
Uložení extruderu jsem udělal kompatibilní s momentálně nejrozšířenější platformou. A díky tomu by modifikace pro CR10, Ender E16 a další tiskárny měli jít použit.
Z osa bude poháněna jen jedním motorem.
Pro řízení jsem koupil 32bit Re-Arm spolu s Ramps 1.6 a drivery TMC2130 v SPI variantě.
6 endstopů je samozřejmost a stejně tak sensor filamentu či sonda BL touch.
Kostka je větší než by musela být ale třeba bude časem výměna nástrojů, více filamentů a podobně.
Re: Rady 3D tisk.
ty jsi to teda rozjel ve velkym , jaká bude finální isková plocha ?
Re: Rady 3D tisk.
paráda, na mě je tohle ještě pořád moc velká věda. Já se zasekl na tom, že jsem schopen opravit do je potřeba na Prusovi. Ale pozvona začínám pokukovat na krichlové konstrukci a deltě. Čekám s čím Průša ke konci roku vyleze a pokud to nebude nic kloudnýho, asi se pozvolna do něčeho taky pustím. Minimálně na úrovni zkoumání. Hádám, že aby jsi byl schopen dát dohromady a rozhýbat svojí tiskánu, můsíš být schopen poladit OS řídící desky?
2,4 Ghz
http://zaxcz.rajce.idnes.cz/
http://zaxcz.rajce.idnes.cz/
Re: Rady 3D tisk.
konstrukce asi zase tak složitá nebude , průměrný kutil by to mohl zvládnout v pohodě a ten kdo tiskárnu má a ví jak funguje a co a jak na ní je potřeba tak úplně bez problémů .
jednotka by šla použít podle mě z jakékoly tiskárny , myslím si že jde o nastavení ve sliseru , jak mu zadáš velkou tiskovou plochu , hodbed a hotend ne řešit nemusí a extruder taky ne .
jednotka by šla použít podle mě z jakékoly tiskárny , myslím si že jde o nastavení ve sliseru , jak mu zadáš velkou tiskovou plochu , hodbed a hotend ne řešit nemusí a extruder taky ne .
Re: Rady 3D tisk.
Zaklad jsou 4 krokove motory pro pohyb v ose X,Y,Z a extruder
Na extruderu je topne teleso a cidlo teploty.
Pak mame jeste snimani polohy pocatecniho bodu.
No a zbyva uz jen vyhrivana podlozka s cidlem teploty.
Mechanicky to je pomerne snadne. Pouziti ridici jednotky z jine tiskarny neni uplne idealni a omezujici.
Pokud neni podpora komunitnich firmwaru, tak s tim clovek moc neudela.
Takze nejbeznejsi kombo je Arduino a Ramps.
Lepsi je jit cestou univerzalni a podporovane jednotky, se kterou si clovek muze hodne vyradit.
Nekteri si vsimli, ze ve vyctu neni snimani polohy. Protoze zadne neni. Firmware tiskarny akorat nakrmime poctem mikro kroku motoru na milimetr a aktualni polohu si tiskarna pocita sama.
Firmware je dnes celkem jednoducha zalezitost. Hlavni jsou Marilin a Repetier.
Kdyz jsem mel Rebela, tak jsem mel Ramps 1.4. a do nej jsem si firmware generoval sam, protoze jsem nesehnal spravne cidlo teploty.
Takze pres online konfigurator https://www.repetier.com/firmware/v100/ jsem vybral co mam za desku. Konstrukci tiskarny, smer pohybu motoru, pocty mikro kroku a hlavne jsem tam vyplnil novou tabulku hodnot pro moje termistory.
Pak uz jen stacilo vygenerovat firmware. Nahrat do tiskarny. Overit funkci, kalibraci a pripadne doladit hodnoty v dalsi revizi firmware.
Na extruderu je topne teleso a cidlo teploty.
Pak mame jeste snimani polohy pocatecniho bodu.
No a zbyva uz jen vyhrivana podlozka s cidlem teploty.
Mechanicky to je pomerne snadne. Pouziti ridici jednotky z jine tiskarny neni uplne idealni a omezujici.
Pokud neni podpora komunitnich firmwaru, tak s tim clovek moc neudela.
Takze nejbeznejsi kombo je Arduino a Ramps.
Lepsi je jit cestou univerzalni a podporovane jednotky, se kterou si clovek muze hodne vyradit.
Nekteri si vsimli, ze ve vyctu neni snimani polohy. Protoze zadne neni. Firmware tiskarny akorat nakrmime poctem mikro kroku motoru na milimetr a aktualni polohu si tiskarna pocita sama.
Firmware je dnes celkem jednoducha zalezitost. Hlavni jsou Marilin a Repetier.
Kdyz jsem mel Rebela, tak jsem mel Ramps 1.4. a do nej jsem si firmware generoval sam, protoze jsem nesehnal spravne cidlo teploty.
Takze pres online konfigurator https://www.repetier.com/firmware/v100/ jsem vybral co mam za desku. Konstrukci tiskarny, smer pohybu motoru, pocty mikro kroku a hlavne jsem tam vyplnil novou tabulku hodnot pro moje termistory.
Pak uz jen stacilo vygenerovat firmware. Nahrat do tiskarny. Overit funkci, kalibraci a pripadne doladit hodnoty v dalsi revizi firmware.
